This robot dog learned a new trick—balancing like a cat
Without a tail and a bendy spine, nonetheless.

We’ve seen how a quadruped robot dog can dribble a ball, climb walls, run on sand, and open doors with its “paws.” The latest test isn’t that of motion, necessarily, but of balance. This time, researchers at Carnegie Mellon University’s Robotics Institute have found a way to make an off-the-shelf quadruped robot agile and stable enough to walk across a balance beam.
Even for humans, the balance beam is quite a feat to conquer—something that leaves even gymnasts nervous. “It’s the great equalizer,” Michigan women’s gymnastics coach Beverly Plocki told the Chicago Tribune in 2016. “No other event requires the same mental focus. You stumble on the floor, it’s a minor deduction. The beam is the event of perfection. No room for error.”
[Related: A new tail accessory propels this robot dog across streams.]
But in robot dogs, their legs aren’t exactly coordinated. If three feet can touch the ground, generally they are fine, but reduce that to one or two robot feet and you’re in trouble. “With current control methods, a quadruped robot’s body and legs are decoupled and don’t speak to one another to coordinate their movements,” Zachary Manchester, an assistant professor in the Robotics Institute and head of the Robotic Exploration Lab, said in a statement. “So how can we improve their balance?”
How CMU’s scientists managed to get a robot to daintily scale a narrow beam—the first time this has been done, so the researchers claim—is by leveraging hardware often used on spacecrafts: a reaction wheel actuator. This system helps the robot balance wherever its feet are, which is pretty helpful in lieu of something like a tail or a flexible spine which helps actual four-legged animals catch their balance.
[Related: This bumblebee-inspired bot can bounce back after injuring a wing.]
“You basically have a big flywheel with a motor attached,” said Manchester. “If you spin the heavy flywheel one way, it makes the satellite spin the other way. Now take that and put it on the body of a quadruped robot.”

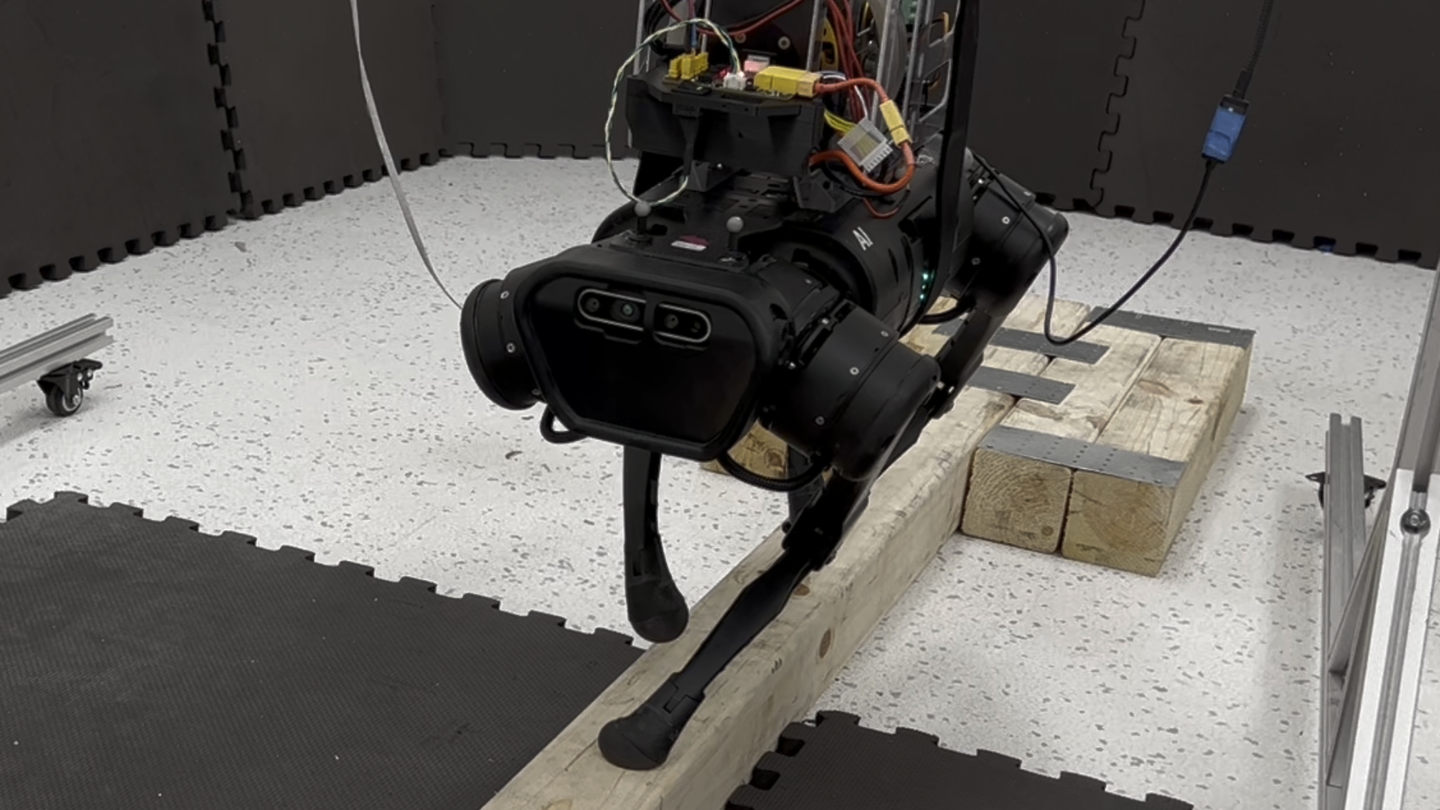
The team mounted two reaction wheel actuators on the pitch and roll axis of a commercial Unitree A1 robot, making it so the little bot could balance itself no matter where its feet were. Then, they did two dexterity tests—the first dropping it upside down from about half a meter in the air. Like a cat, the robot was able to flip itself over and land on its feet.
Second came the balance beam test, this time making the robot walk along a six-centimeter-wide balance beam, which the bot did with ballerina-like gracefulness. This could come in handy in the future, not only for purely entertainment value, but maneuvering tricky scenarios in the case of search-and-rescue, which is often a goal for development across all sorts of robots. The team will be showing off their latest endeavor at the 2023 International Conference on Robotics and Automation this summer in London.

